



Investigadores de la Escuela Politécnica Federal de Lausana (EPFL) y de la Universidad Konkuk en Corea del Sur han desvelado los mecanismos pasivos de despliegue y retracción de las alas en los escarabajos rinoceronte.
Este hallazgo, publicado en Nature, ha permitido el desarrollo de un microrobot con alas batientes que no requiere actuadores extensos para su funcionamiento.
El vuelo de los insectos
Aunque se cree que los insectos despliegan y retraen sus alas activamente mediante músculos torácicos, los métodos actuales de monitoreo muscular no han podido confirmar qué músculos están involucrados ni cómo se realiza este proceso en los escarabajos.
Las alas traseras de los escarabajos, semejantes a estructuras de origami plegables, se guardan bajo los élitros (alas delanteras endurecidas) cuando no están en uso y se despliegan pasivamente durante el vuelo.
Estudios previos intentaron replicar esta dinámica en robots sin prestar mucha atención a los movimientos en la base de las alas traseras. En investigaciones anteriores, Hoang-Vu Phan, autor principal del estudio, observó que los escarabajos utilizan sus élitros y las fuerzas de aleteo para desplegar pasivamente sus alas traseras al volar.
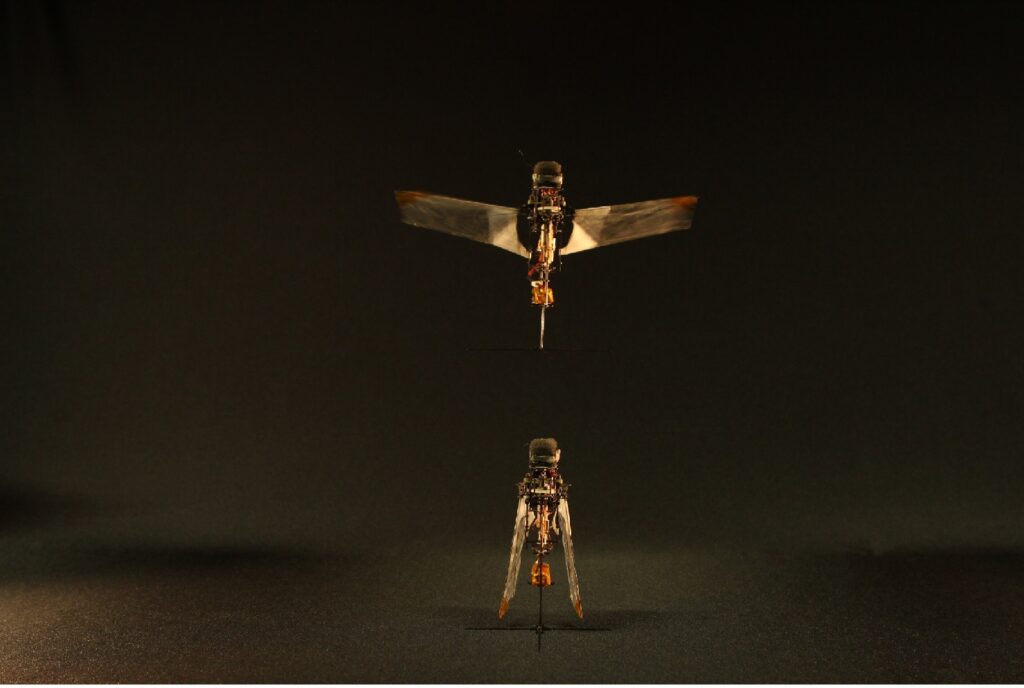
Una vez que aterrizan, vuelven a usar los élitros para replegar las alas sin necesidad de músculos torácicos, lo que difiere de aves y murciélagos. Implementando este mecanismo pasivo en un microrobot de 18 gramos, los investigadores lograron que el robot desplegara y replegara sus alas de manera pasiva.
El robot, dos veces más grande que un escarabajo real, utiliza tendones elásticos en sus «axilas» para cerrar sus alas pasivamente. Al activar el movimiento de aleteo, el robot puede desplegar sus alas, despegar y mantener un vuelo estable. Al detener el aleteo, las alas se repliegan rápidamente sin necesidad de actuadores adicionales.
Usos
El microrobot con alas plegables puede ser útil en misiones de búsqueda y rescate en espacios confinados, como edificios colapsados, gracias a su capacidad para entrar en espacios estrechos y cambiar de modo de locomoción de vuelo a caminata cuando sea necesario.
Además, el robot podría ayudar a los biólogos a estudiar la biomecánica del vuelo de los insectos y ser utilizado como insectos espías para explorar la vida de insectos reales en su hábitat natural.
Los investigadores han evaluado preliminarmente el rendimiento del microrobot con resultados prometedores. En el futuro, planean mejorar su diseño y probarlo en escenarios del mundo real para validar su potencial.