


En las próximas décadas, los robots van a meterse en casas, oficinas y espacios públicos. No será ciencia ficción. Será parte de la rutina diaria, como hoy lo es el celular.
Los más avanzados son los robots con patas. Tienen un cuerpo central y extremidades, como un animal. Esa forma les da ventaja frente a los robots con ruedas.
Pueden subir escaleras, esquivar obstáculos y moverse por terrenos irregulares. Llegan a lugares donde las ruedas simplemente no funcionan. Son más versátiles, más “todoterreno”.
El problema es otro. Muchos solo hacen bien lo que practicaron miles de veces en simuladores. Cuando enfrentan situaciones nuevas con personas reales, se bloquean.
La investigación
Ahí entra un equipo de la Korea University, la ETH Zurich y la University of California Los Angeles. Se preguntaron algo simple: ¿y si entrenamos robots como se entrena a un perro?
La idea nació observando a adiestradores profesionales. Los perros no aprenden aislados. Miran, imitan, reciben guía física y responden a señales sociales.
Primero usan premios, como comida o juguetes, para moldear la conducta. Después, cuando el perro entiende, ya no necesita recompensa. Basta una orden o un gesto.
Los investigadores copiaron ese principio. En lugar de premios, usaron una varilla de entrenamiento que el robot debía seguir. Esa guía física le enseñaba el movimiento correcto.
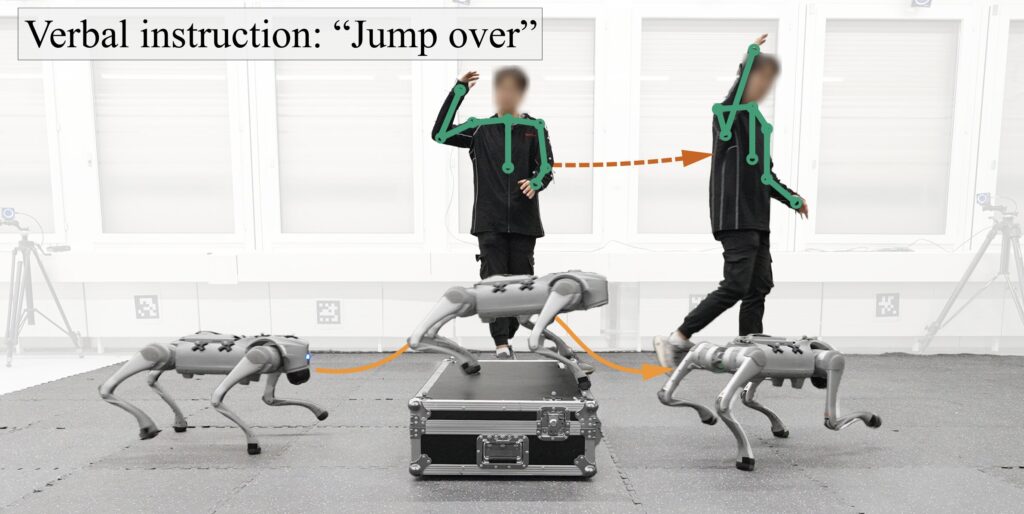
Con pocas interacciones reales, el robot aprende una conducta nueva. Luego deja la varilla y responde solo a gestos o comandos de voz. Igual que un perro entrenado.
El sistema también recrea las escenas en simulación. Es decir, toma lo que pasó en el mundo real y lo convierte en un entorno virtual donde el robot practica solo.
Eso ahorra tiempo y esfuerzo. Recoger datos humanos todo el día cansa. Aquí, con pocas sesiones reales, el robot mejora por su cuenta en el simulador.
Aplicaciones
Probaron el método en un robot cuadrúpedo real. Aprendió rápido a acercarse a una persona, saltar obstáculos, seguir a alguien y moverse en zigzag.
La tasa de éxito fue de 97.15%. No es menor. Es un resultado muy alto para tareas nuevas aprendidas en poco tiempo.
Este enfoque podría acelerar el entrenamiento y volver más intuitiva la interacción humano-robot. No haría falta ser programador para enseñar algo básico.
Los investigadores quieren ir más allá. Ahora buscan que estos robots no solo se muevan, sino que también manipulen objetos mientras caminan.
A largo plazo, apuntan a robots humanoides que aprendan conductas complejas mediante interacción física y luego obedezcan gestos y voz.
La meta es clara: robots que aprendan de forma continua, convivan con personas y se adapten con facilidad a entornos reales, no solo a mundos simulados.